7.2. Critical Sections and Peterson’s Solution¶
Critical sections are sequences of instructions that
cannot be interleaved among multiple threads. A simple example of a critical
section arises when two threads share a global variable globalvar and both
try to change its value with globalvar++. Recall from the previous chapter
that this line of code compiles into three assembly-language instructions to
load, modify, and store the result.
1 2 3 | movq _globalvar(%rip), %rsi # copy from memory into %rsi register
addq $1, %rsi # increment the value in the register
movq %rsi, _globalvar(%rip) # store the result back into memory
|
When multiple threads execute this code, a race condition arises since the lines can be interleaved. For instance, an interrupt during the second instruction’s execution could trigger a switch from one thread to another. Code Listing 7.1 shows the interleaved sequence of instructions (distinct indentation denotes the two threads) that would result from this unfortunate timing of the interrupt.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 | # Code Listing 7.1:
# A possible sequence of assembly language instructions with a race condition
# Thread A copies globalvar (5) into %rsi, adds 1 to it
movq _globalvar(%rip), %rsi
addq $1, %rsi
# Interrupt: Kernel switches to start running thread B
# Thread B begins same code, also loads value of 5 into %rsi
movq _globalvar(%rip), %rsi
addq $1, %rsi
movq %rsi, _globalvar(%rip)
# Thread B has copied 6 back into globalvar in memory
# Kernel later switches back to thread A
# Thread A also copies 6 back into globalvar
movq %rsi, _globalvar(%rip)
|
The result of this interleaving, assuming globalvar was originally 5, is
that the threads (together) performed globalvar++ twice, but the value only
gets changed to 6 instead of the correct value of 7. The problem is that an
interrupt occurred before the first thread was able to update globalvar,
then the kernel switched to a different thread that read the old value. If this
switch had not occurred until later, then the first thread would have updated
globalvar with the value of 6, which is what the second thread would observe
instead of the outdated 5.
It is important to note that the problem isn’t the interrupt, per se. If the
interrupt occurs and the kernel switches to any other thread, or if the second
thread were executing a different portion of code that had nothing to do with
globalvar, the correct result would be produced. The error arises because of the
combination of the interrupt/switch with the fact that both threads are
accessing the same variable.
7.2.1. Peterson’s Solution¶
One approach to solving the problem of critical sections is to employ Peterson’s
solution, an algorithmic approach that uses shared memory to declare intentions.
Code Listing 7.2 shows the algorithm, which uses a bool array
(flag) to signify a thread’s intent to enter and an int variable (turn)
to indicate which thread is allowed to enter. [1]
1 2 3 4 5 6 7 8 9 10 11 12 | /* Code Listing 7.2:
Peterson's solution to solving the critical section problem
*/
flag[self] = true;
turn = other;
/* busy wait until it is safe to enter */
while (flag[other] == true && turn == other) ;
/* critical section */
flag[self] = false;
|
The turn variable plays a critical role in ensuring the correct functioning
of the solution. Specifically, this variable makes threads adopt a polite
approach to requesting access: when a thread wants to enter the critical
section, it must declare that the other thread gets to go first. Since this type
of variable manipulation consists of a single write to memory, it can be
considered atomic. Consequently, this update does not create a race condition.
Figure 7.2.1 illustrates all possible states and transitions
for Peterson’s solution. In this model, there are three basic types of events
for each thread: WAIT, ENTER, and EXIT. The six states at the top of
the model show the transitions when there is no contention. For example, from
the left non-critical state (neither are waiting, turn = 1), thread 0 could
indicate it attempts to enter the critical section with the WAIT event and
immediately enters with the ENTER event. The EXIT event restores the
system to the non-critical state.
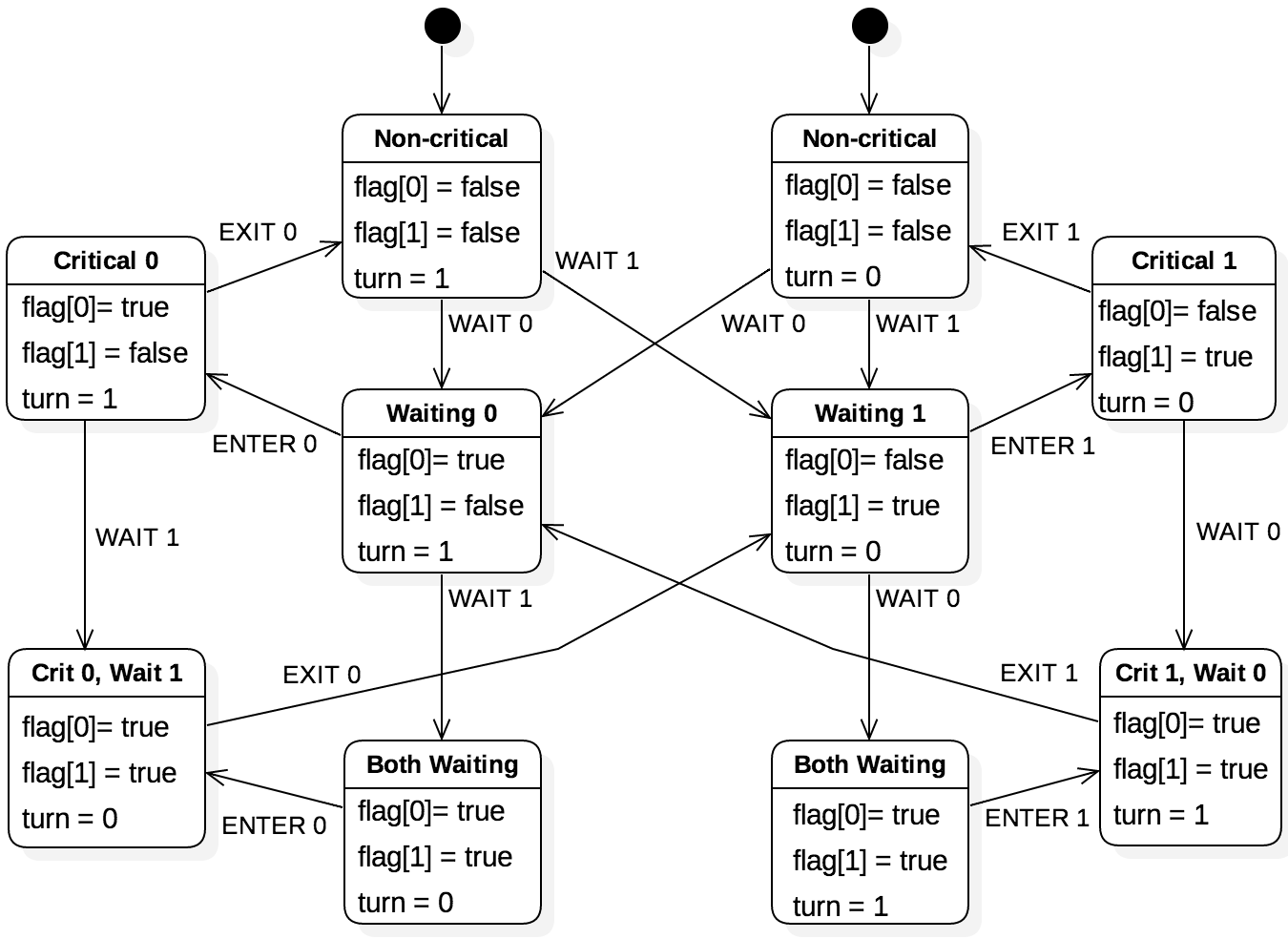
Figure 7.2.1: State model of Peterson’s solution
The four states at the bottom illustrate how the algorithm handles contention.
If neither thread has entered the critical section (states Waiting 0 and
Waiting 1), then the turn variable determines which thread enters. That is,
the condition of the while loop can only resolve to true for one of the threads,
blocking the other from entering. On the other hand, one thread may already be
in the critical section (states Critical 0 and Critical 1) when the
other attempts to enter. In that case, the new thread is forced to wait by the
turn variable. Note that Peterson’s algorithm can be extended to more than two
threads, as well.

Example 7.2.1
The state model in Figure 7.2.1 can be difficult to
trace. Although it would be impractical to provide a full description of all
possible sequences, we can describe a basic trace that traverses through seven
of the states. As before, we use indentation to denote the separate threads,
with thread T0 unindented and T1 indented. Comments interspersed
indicate the state and changes to relevant variables.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 | /* Initial state: Non-critical with turn=1 */
flag[0] = true;
turn = 1; /* Change to Waiting 0, turn=1 */
flag[1] = true;
turn = 0; /* Change to Both waiting, turn=0 */
/* Both are waiting, so turn is the tie-breaker */
while (flag[1] && turn == 1) ; /* FALSE, turn=0 */
while (flag[0] && turn == 0) ; /* TRUE, T1 blocked */
/* Enter Critical 0, Waiting 1
Thread 0 does critical work here */
flag[0] = false; /* Enter Waiting 1, turn=0 */
while (flag[0] && turn == 0) ; /* FALSE, flag[0] now false */
/* Enter Critical 1
Thread 1 does critical work here */
flag[1] = false; /* Enter Non-critical with turn=0 */
|
In this trace, both threads begin in non-critical code with neither attempting
to enter a critical section until T0 executes line 2. T1 then declares
its intention to enter on line 4. Lines 3 and 5 are the key events to control
the ordering; whichever thread sets turn last loses the rase. Since T1
changes turn after T0 does, T0 will be the thread to enter the critical
section. To confirm this fact, check the while-loop conditions on lines 8
and 9. On these lines, flag[0] and flag[1] are both true. The condition
then rests exclusively on turn. Later, after T0 leaves the critical section
(line 13), T1’s while-loop condition changes because flag[0] is now
false; this change allows T1 to break out of the loop and continue into the
critical section.
7.2.2. Synchronization Properties¶
Peterson’s solution provides three desirable properties for solutions to synchronization problems:
- Safety – There is no way for two threads to be in the critical section concurrently, so they cannot interfere with each other. This property is also called mutual exclusion.
- Liveness – If no thread is in the critical section and at least one tries to enter, then one of the threads will be able to enter. This property is also called progress.
- Fairness – Assuming neither thread can remain in the critical section indefinitely, if a thread attempts to enter the critical section, it will eventually do so. This property is also called bounded waiting.
Examining Figure 7.2.1 provides informal assurance that
these properties hold. Safety is achieved, because no state allows both threads
to be in the critical section at any time. Liveness is supported by the fact
that all of the waiting states have a transition defined for an ENTER event;
liveness could only be broken if the system could get stuck in a waiting state.
Fairness is somewhat more difficult to observe, but arises from the Crit M,
Wait N states in which one thread is in the critical section and the other
is trying to enter. All possible sequences of events from these states must pass
through a state in which the waiting thread gets to enter. Thus, no thread that
tries to enter the critical section can be infinitely blocked from doing so.
The combination of all three of these properties is very difficult to achieve for synchronization problems. Generally speaking, safety is a requirement and no approach would be considered a solution without guaranteeing mutually exclusive access. Liveness is also a standard requirement; approaches that make it possible to enter a deadlock state that blocks all threads from entering the critical section are also not considered viable solutions.
In contrast, fairness is quite often difficult to achieve in practice and may even be unnecessary. For instance, consider a system that picks randomly between threads that are waiting to enter. In addition, assume that each thread will immediately try to enter the critical section after leaving it. It is theoretically possible that one thread might be extremely unlucky and never gets picked. If the choice truly is randomly distributed, this outcome would be as likely as flipping a coin and getting the same result every time. It is theoretically possible, but unlikely to happen in practice.
This scenario highlights a key misunderstanding of the liveness property. If there are no threads in the critical section and one tries to enter, there is no guarantee that thread will actually be the one allowed in. Rather, without the fairness property, it may be possible for another thread to come along and enter without waiting. To illustrate this point, consider the approach shown in Code Listing 7.3. This code meets the safety and liveness properties by permanently blocking out one of the threads.
1 2 3 4 5 6 7 8 | /* Code Listing 7.3:
An approach that guarantees safety and liveness but not fairness
*/
if (thread == 0)
while (1) ; /* thread 0 waits infinitely */
/* enter critical section */
|
7.2.3. Peterson’s Solution and Modern Hardware¶
The elegance of Peterson’s solution makes it an interesting approach that provides these three key properties. However, this approach is generally not used in modern systems. Peterson’s solution rests on the assumption that the instructions are executed in a particular order and memory accesses can be achieved atomically. Both of these assumptions can fail with modern hardware. Due to complexities in the design of pipelined CPUs, the instructions may be executed in a different order. Additionally, if the threads are running on different cores that do not guarantee immediate cache coherency, the threads may be using different memory values.
Although there are hardware mechanisms available to overcome these issues, Peterson’s solution also suffers from its lack of abstraction. From the systems programmer’s perspective, it is more desirable to use abstractions such as locking and unlocking a critical section rather than setting memory bits. As such, the remainder of this chapter will focus on higher-level abstractions and techniques that facilitate more robust and adaptable solutions, called synchronization primitives, to these types of problems. In general, these primitives fail to guarantee fairness and thus cannot provide the same theoretical properties of Peterson’s solution. However, their higher level of abstraction provides greater clarity in their practical use.
| [1] | The standard explanation of Peterson’s solution uses 0 and 1 to refer
to the two threads, respectively. Here, we adopt a higher level of abstraction,
using self and other to refer to the two. For thread 0, self would
be 0 and other would be 1; the reverse is true for thread 1. |