CS 354 Autonomous Robotics
Fall 2020
Turlebot Simulation
Goals
The purpose of this programming assignment is to:
- validate that your ROS 2 environment is configured and functioning
- introduce ROS simulation
- introduce ROS nodes and topics and the concepts of being a publisher and a subscriber
Deliverables
Working in groups of two:
- Complete the tasks in the lab with TurtleBot3
- Complete the tasks in this text document, filling in your answers
- Submit the RosCommandLineQuestions.txt file to Canvas
TurtleBot3 Simulation
- Open a new terminal window and type the following:
This should print out waffe-pi. If this does not print out, you should review the workstation configuration documentation before continuing with the lab.echo ${TURTLEBOT3_MODEL} - Open a new terminal window and type the following (this a good time to
experiment with tab completion.
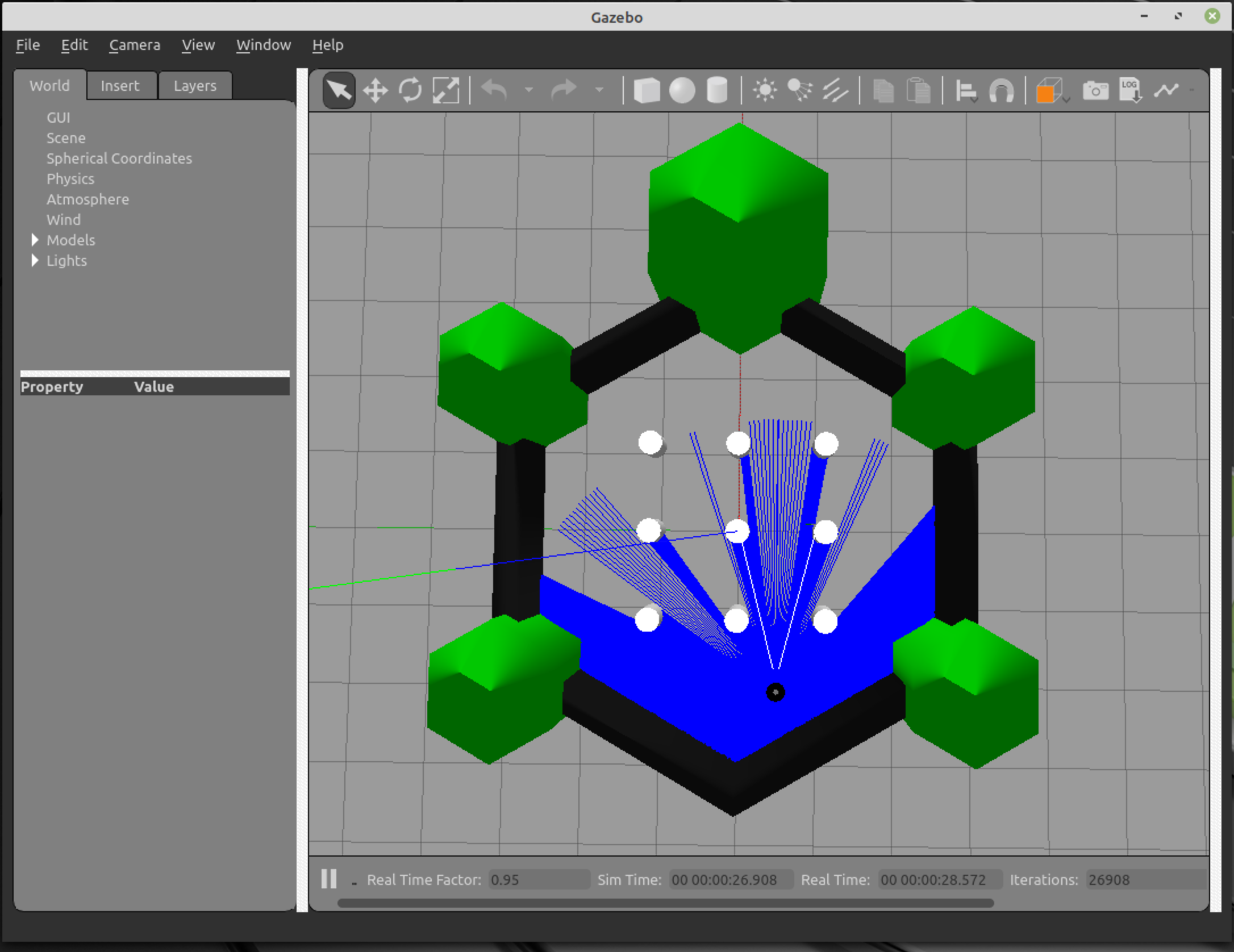
This screen pictured below should appear.ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py - Open a new terminal/tab and type the following command:
This will enable you to move around the turtlebot using the keyboard.ros2 run turtlebot3_teleop teleop_keyboard - Open a new terminal/tab and type the following command:
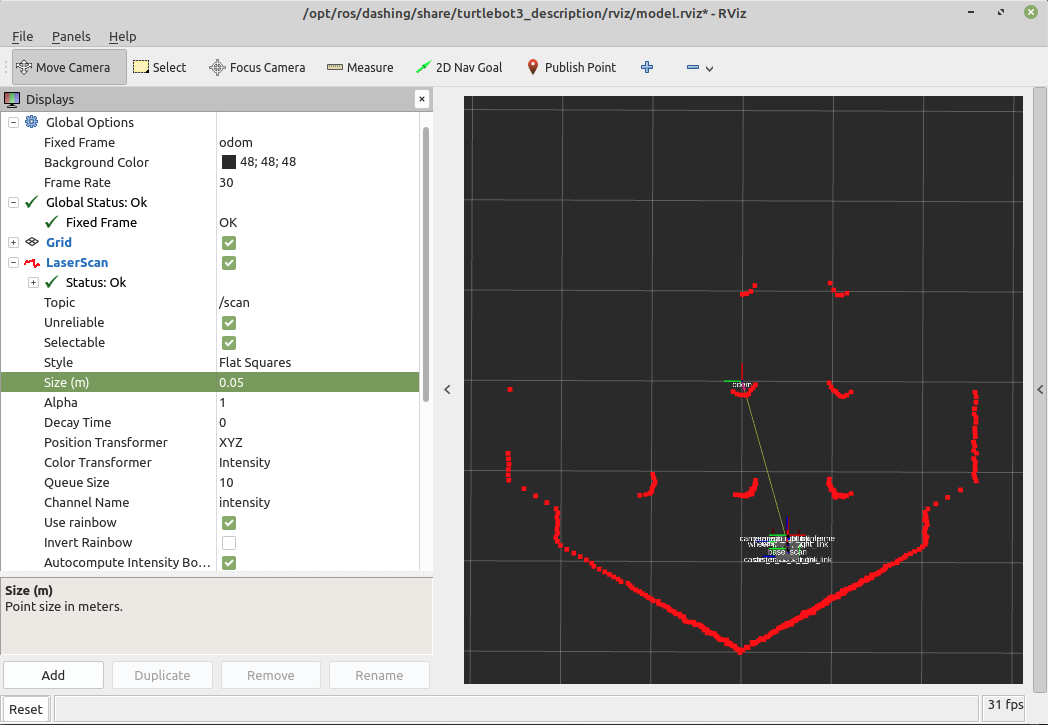
This will start rviz, allowing you to visualize some of the robot's sensor readings. Select the check-boxes assocaited with LaserScan and Images. You may want to uncheck Odometry for right now. Drive around the robot using the tele_op window. If you need to change the size of the "obstacles" pixels drawn on the screen, under the LaserScan there is a size attribute that you can change.ros2 launch turtlebot3_bringup rviz2.launch.py
TurtleBot3 Simulation
Complete the following tasks and answer the questions
in ROS2CommandLineQuestions.txt.
PA originally developed by Nathan Sprague utilizing ROS 2 Turtlebot code.