RRT Demo…

Nathan Sprague
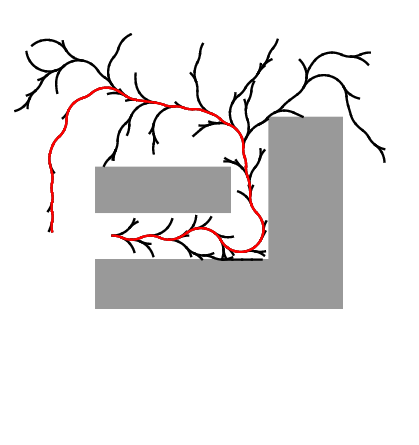
def rrt(problem, q_init, tree_size):
""" Build a rapidly exploring random tree.
"""
tree = Tree(q_init) # Make the start state the root of the tree
while tree.num_nodes() < tree_size:
q_rand = problem.random_state()
q_near = nearest_neighbor(tree, q_rand)
u = problem.select_input(q_rand, q_near)
q_new = problem.new_state(q_near, u)
tree.add_node(q_new)
tree.add_edge(q_near, q_new)
return tree

def prm(problem, delta, roadmap_size):
""" Create a Probabilistic Roadmap.
"""
graph = Graph()
while graph.num_nodes() < roadmap_size:
q_rand = problem.random_state()
graph.add_node(q_rand)
for q in neighbors(graph, q_rand, delta):
if problem.no_collision(q, q_rand):
graph.add_edge(q, q_rand)
return graph